Synopsis:
The Pipe-Climbing Robot was designed to traverse along the steel pipes via means of magnetic adhesion. The robot, with 2 separate bodies linked together, is able to fit the curvature of a pipe's varying diameter. Equipped with a camera system, the robot is able to provide a live feed transmission to a user, and has the ability to record videos and take photos of the pipe.
Description:
Quay cranes at ports are susceptible to corrosion and thus require regular inspection. The pipe-climbing robot was designed to perform visual inspection of the quay cranes to replace human inspection.
This robot uses magnetic wheels to attach itself on to the metal pipes and can be controlled using a joystick remote controller. The knuckle joint in-between the two bodies, allows the robot to align and fit itself onto the curvature of the pipe. The camera system is able to rotate in 2 axes, enabling the user to view more areas of the pipe via an app.
This improved version has been re-designed to accommodate a reduced overall body size with smaller wheels. The robot is now significantly lighter, at 7 kg, and is slightly more splash proof. The robot now also comes with a handle for easier handling.
Some of the improved features are highlighted below:
1) Compact body encased with lighter materials reduces the weight and size of the robot enabling easier handling.
2) Reduced wheel diameter - from 100mm to 60mm - allows for the use of smaller magnets, which not only reduces the weight significantly but also ensures that the magnetic adhesion is not too strong.
3) Improved splash proofing through the use of rubber stoppers to cover holes.
4) Limiting-string addition between the two bodies prevents over flexing.
5) Updated electronics and programming significantly improves the robot's responsiveness.
In addition, a new robot was also designed and built based on a different theory; Halbach Array. This significantly improves the strength of the magnetic adhesion of several magnets placed together in a row. The robot, known as the Halbach robot, utilises Mecanum wheels for manoeuvring in all directions on the pipe. The robot's body was made to be very compact to fit in as much components as possible, without increasing its weight significantly. A mechanical lifting system was implemented to raise and lower the magnets. The camera system for the Halbach robot was equipped with a camera capable of taking high definition videos and photos.

Robot Reversing on Pipe.
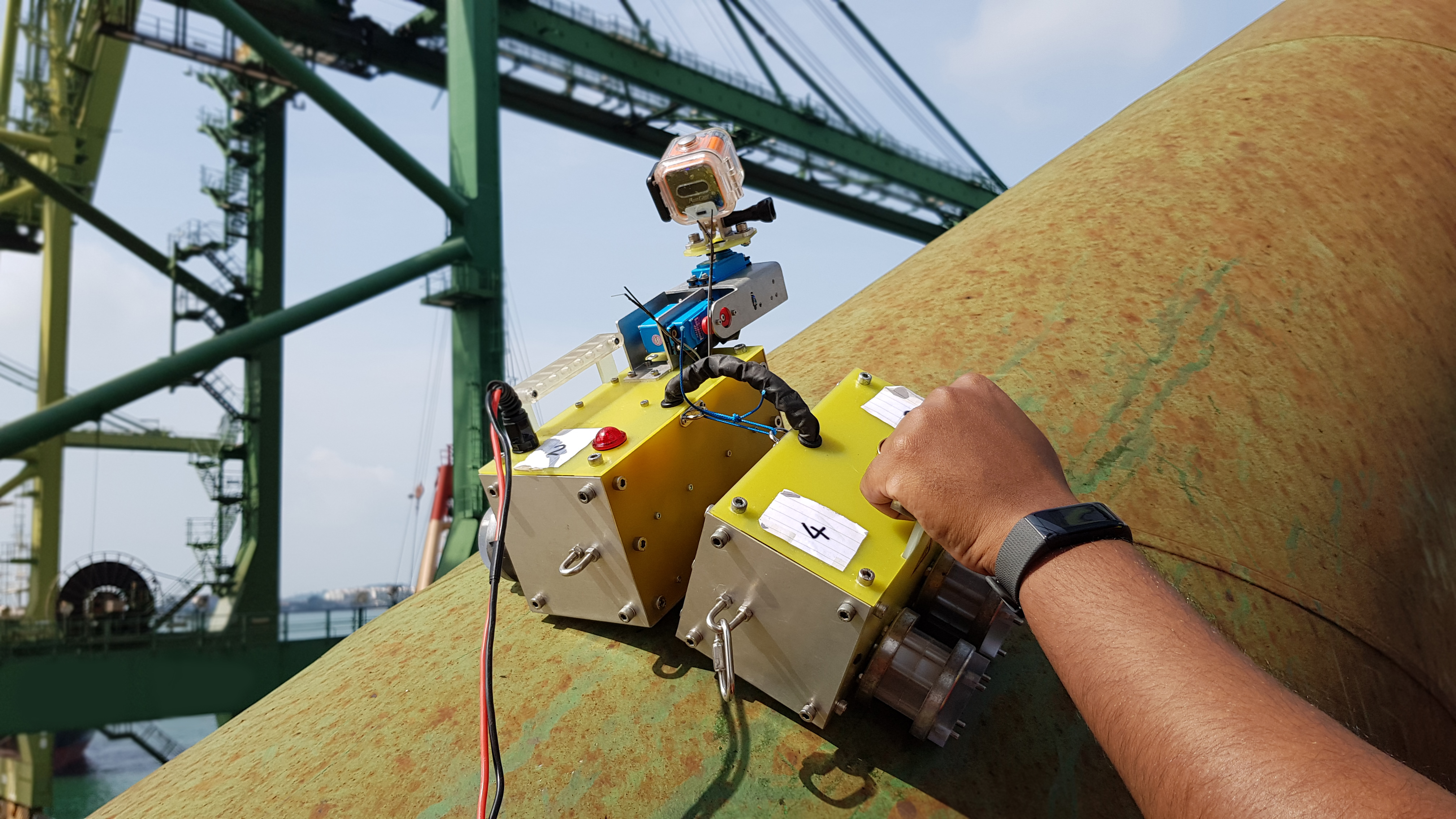
Robot Moving Forward on Top of the Pipe.
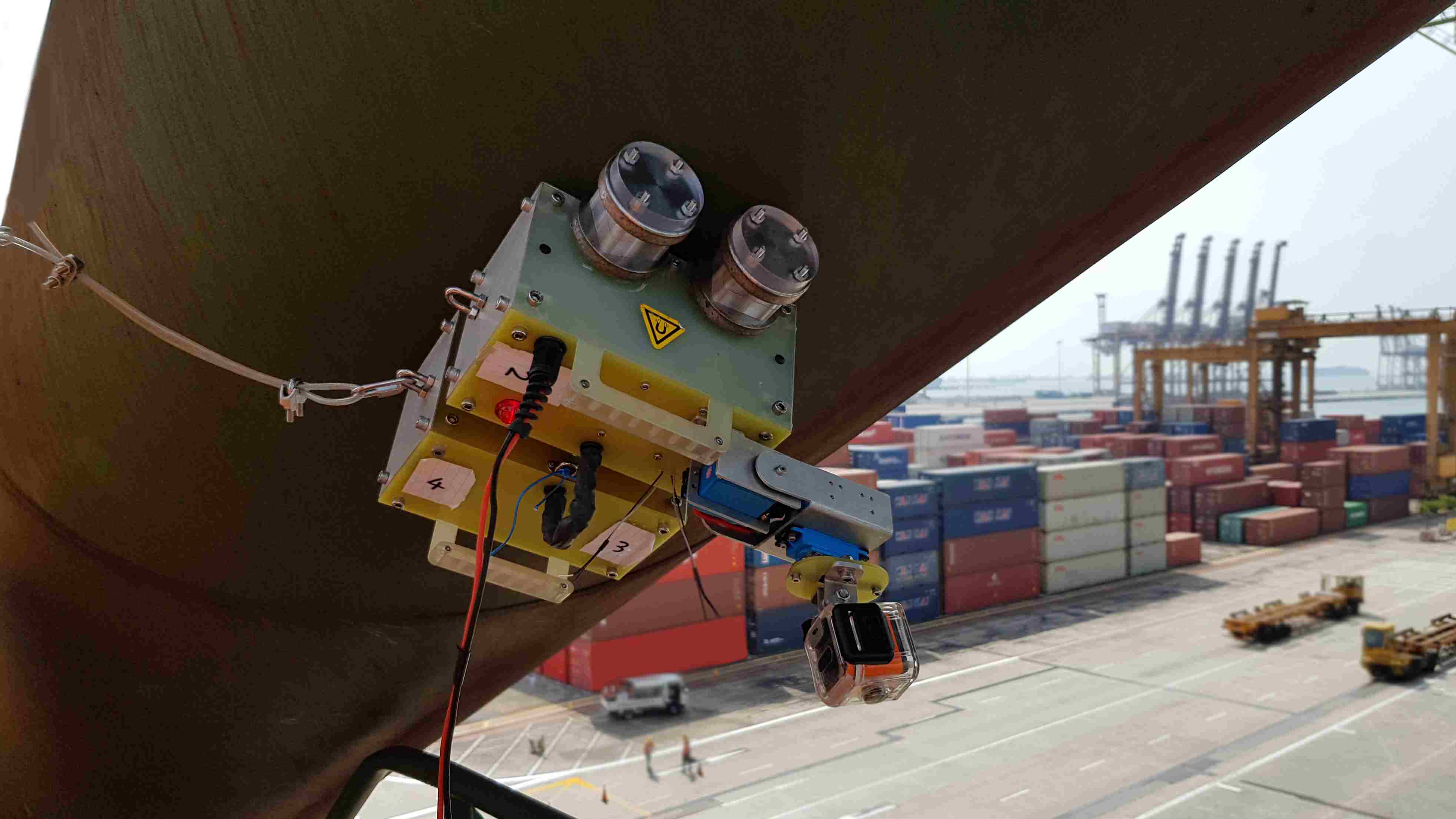
Robot Traversing on the Underside of the Pipe.

Robot Moving Forward on the Pipe.

Robot Travelling Along the Side of the Pipe.
Project Video Clip
Project Thematic Number: IA04M
Theme: Industrial & Automation
School: School of Mechanical & Aeronautical Engineering
Course: Diploma in Mechatronics and Robotics
Supervisor: Thevaraja Ramu
Students: Koh Jian Feng Ryan, Karishein Chandran, Chin Chong Yuan, Prasad S/o Tamil Selvan